Table of Contents:
– Introduction
– Unboxing,Look, and Feel
– Navigating the Binoculars
– Optical Performance
– Laser Performance
– Other Onboard Sensors
– The Smartphone App(s)
– Range Enhancers and other aftermarket accessories
– Summary and Conclusion
– Background on Ballistics Calculation, Modeling, and Applied Ballistics Elite
– Background on How Laser Rangefinders Work
– Background on the Challenges of Getting Optical Performance from a LRF Bino
– Background GPS Mapping with BaseMap:
Introduction:
Safran is a large military / aerospace company best known in precision rifle circles for its military electro-optics products marketed under the trade name Vectronix. Despite being originally only sold to military and LEO, many of these products were nevertheless civilian legal and became popular on the secondary market. The most important among these was probably the original Vectronix Terrapin that for years was the undisputed best laser rangefinder a person could get for substantially less than the price of a car. Perhaps because of this unexpected popularity on the secondary market, Vectronix dipped its toe into the civilian market with the Terrapin X in 2018. The Terrapin X was something of a trial balloon as they contracted it’s manufacture from Leica and therefore did not have to risk expanding manufacturing abilities in order to test the potential of the civilian market for their products. The Terrapin X had successes and convinced Safran to create a commercial business unit within the company under their well known Vectronix branding dedicated to commercial products for long range shooters and hunters. These Vector X laser rangefinding binoculars and the Radical X sister product that is the same binocular without the rangefinder are the first products of that new division.

A few months ago, the Vectronix folks reached out to Frank and I. They were interested in having us review the Vector X binoculars on the hide. Given all the work I had recently done with the Leica Geovid pro and Sig 10k reviews as well as Franks work with the Terrapin X and the EveryDaySniper podcast on electro optics and applied ballistics we did together, this looked to be a great fit. During out meeting with Philip, the product manager the new commercial business unit, I was struck with how much work Vectronix had put into understanding specific rangefinding use cases and workflow both for competitive shooters and for hunters. They have designed the Vector X’s with some interesting solutions to overcome some of the trade offs usually faced when trying to serve substantially different customer use cases. Notable features on the Vector X binos are, top tier glass competitive with Leica Geovid Pros, Applied Ballistics Elite built in, exceptional connectivity to other electronic devices, an etched reticle and screw in magnification boosters for spotting scope replacement, a tripod mounting point on the barrel, CR123 or 18650 battery options, an AMOLED screen and D-Pad interface, and a ranging engine competitive with the Sig 10ks.
Unboxing, Look, and Feel:
Although I knew I would be receiving a number of optional accessories at the same time as the review pair of Vector X binoculars I was surprised to find these extras wrapped up in a shiny media bundle all nicely packaged and with a glossy product guide. I felt like a tech industry reviewer for a day as that sort of product roll out is common in the much larger tech industry but pretty rare in the outdoor sports world. What was included in this package was, with all retail packaging and accessories, a 10x set of Vector X late stage engineering sample binoculars, the range enhancers (thread on 40% magnification boosters), threaded Tenebraex combination ARD and flip caps, an Area 419 arca mount, an RRS arca mount, a glossy informational brochure, a very nice case, and a chicken dance patch.

I think it’s best if I cover the aftermarket accessories in their own section and stick to the binoculars and their included accessories here. The included accessories the Vector X comes with include, flip caps, an extended batter cap to allow for rechargeable 18650 battery use in addition to the CR123 battery and cap it comes with, a lens cloth, rubber eyepiece protectors, a ¼” x 20 tripod adapter, and a carry case and strap. Vectronix clearly spent some time and thought on these accessories and a number of them are worth pointing out some features on.

The case included with the Vector X binos is a very high quality and made from heavy duty, lightly padded, nylon. It has Velcro MOLLE loops on the front flap and MOLLE loops and webbing on the back. The front panel MOLLE fits the mag boosters if you buy them and are so inclined to attach them there. The rear is clearly designed to attach the case to a backpack. The binocular case closes utilizing a clasp in front allowing you to properly secure the case with the strap attached to the binos but fed out though each side of the case flap so that it can be used to carry the case and binos together. The case also features attachment points for a strap on its sides. The case itself is very large and clearly designed to hold a few extra accessories. For instance, it is deep enough to fit the binos with the Tenebraex ARDs on them. It can even fit the mag boosters though that is a tighter fit than you will probably want and would encourage you to leave them attached. I do not recommend this as the dead air space that creates might foster mold growth between the two if you change environments such as going from a hot soupy day outside to putting the binos in a cool safe in an air conditioned house. Trapping moisture is a bad thing. The case also has a long skinny internal slot on the side designed to fit a Kestrel. Other pockets include a large document pocket behind the binos, a clear pocket on the flap for fitting a map or DOPE card. The case has further been designed to serve as a display stand for this DOPE card even in the wind by having Velcro on the top that interfaces with a strip on the side to hold the flap open and vertical in order to display the DOPE card. The case also has a small pocket on the top inside of the lid with loops for batteries. I do not love battery storage directly above the ocular lenses, but vectronix has included a rubber ocular lens cover that should prevent any damage if used.
Speaking of batteries, the Vector X uses a CR123 battery instead of the more typical CR2. This will last 1.5-2x longer per battery but be sure to buy quality batteries such as the German Varta included. In addition to size, part of the reason rangefinders usually use CR2s is that there are fewer low quality makers of that photo battery than of the CR123 batteries most often used in flashlights. Buy good batteries for your rangefinder, not the cheapest junk you can find. That goes for any batteries and any rangefinder but Vectronix actually mentions it in their manual as well as a recommended battery brand list though, I was unable to find that list on their website. Uniquely, the Vector Xs actually come with a second, extended cap for use with a rechargeable 18650 battery. Both of these caps can attach to the binos with a little military style retainer leash.

Another unique attachment the Vector X and their sibling Radical X binos have is a built in attachment point on the bottom of the right barrel for a tripod mount. Both binos, with their etched reticles and available magnification boosters, are intended to be able to be used as a spotting scope replacement. This attachment point is designed to provide for a more solid tripod attachment then the various bridge mounting tripod adapters many brands use. Included with the binoculars is a small and basic ¼” x 20 female adapter that will fit the binos to many photo tripod heads. Aftermarket, ARCA adapters can be purchased that fit the binos to more robust photo heads or shooting tripods. These mounts are very solid and effective, do be careful though as you can apply a lot of force to the binoculars main tube with them and I expect at least one person will rip a piece off their tube off because they are using the binoculars as a lever to move around a stout shooting tripod head with way too much resistance.
The last accessory to mention is the flip caps. These fit in a groove inside the rubber armor in front of the objective. They can be rotated 360 degrees and have the hinge positioned such that the open cap can lay back flat against the binoculars tube. It’s a nice thought, but in practice, the caps love to catch on the case when the binoculars are being extracted. They like to do this right at the end so that they often have a little velocity as they fly off. In short, they are better than the ones the Geovids have but no match for the integrated design Swarovski NLs have or for the ones integrated in the aftermarket Tenebraex ARD devices.
The binoculars themselves are what I would call a sort of subdued green mossy oak color though Vectronix calls it TAC gray. They weigh in at 34oz and are a little longer and thinner than Sig 10ks or Vortex Fury HD 5000s. The reach to the buttons is a bit more small hand friendly than 10ks but these are still not open frame birdwatching style binos like the Geovid pro and they feel a lot more blocky and less comfortable. This is not helped by the ARCA plate you are likely going to permanently affix to the bottom of the right tube. The mount is worth it though, especially if your going to utilize the Vector Xs as a spotting scope replacement. Just don’t expect the binos to be super comfy for one hand use with a mount on them. Like pretty much any binos these days, the Vector X’s feature multi position twist up eye cups and these are nicely sized for comfortable use. As with other rangefinders there is both a right and left diopter adjustment. These adjustments are suitably super stiff and are actually anodized aluminum instead of having some rubberized coating. Likewise, the focus knob is also anodized aluminum and is large in size with large knurling designed to continue to function well with a gloved hand. The focus is very easy to move and has a quite perceptible lash in the example that I have. That lash in the focus knob is the only aspect of my examination of these binoculars that does not appear quality. The battery cap on the Vector X’s is in the front of the bridge and is quite easy to remove and replace without tools and without cross threading it.

Before I leave the look and feel of the Vector X binos I’ll talk about the etched glass reticle as this is one of the primary features that sets the Vector X and their sister Radical X binoculars apart from their competitors. Few laser rangefinders and even fewer stand-alone binoculars have etched glass reticles designed for spotting shots. The use of high powered binoculars in spotting shots in place of a spotting scope has become much more popular among competitive shooters in recent years as having both eyes on the shot is tremendously helpful in spotting trace. Current thinking is that two eyes at somewhat lower magnification is the best solution for spotting shots. The Vector and Radical X binos with the mag boosters come in at 14x for the 10x model and 17x for the 12x model putting them right in the power range current thinking is gravitating towards. There are two basic reticle types available in these binos with both designed by the guys at FinnAccuracy who even got some notes from our own Frank Galli on the original drafts. FinnAccuracy are well known for their design of the MSR reticle in S&B and a variety of other scopes. The binocular reticles are the SMR and DMR and they are designed for single or dual magnification range respectively. The SMR is a simple graduated L twords the bottom left of the field of view. It is designed to be used only with the binoculars’ base magnification with no mag boosters installed and is ideal for providing an unobstructed view for a user who only occasionally intends to use the milling capabilities of the reticle much and wants it as unobtrusive as possible. This would likely be for using the Vector X or Radical X binos as hunting binos with no intention of using them on a tripod with mag boosters to spot shots and call corrections. The DMR reticle is actually two reticles. On the right is a T- shaped reticle graduated for use with the mag boosters and on the left is the same reticle graduated for use without. The respective reticles are labeled with the magnification they are calibrated for. Both of these T shaped reticles also have a field of 1 mil separated dots to the outside of their central post. I very much like the concept of this DMR reticle and when I tested it, I also found it sized within 1% of correct which is very good. After some use though I think some improvement could be made to the execution. In my opinion, the thinking on the graduation of these reticles owes too much to rifle scope thinking. Binoculars, even on a tripod, are just not as steady as a scope on a well-supported rifle. These reticles really don’t need finer than 1 mil graduations. Also, the 10mil label on the x axis may be ten mills from the other end of the graduations, but it is 5 mils from the center of the T. Labeling it 5 instead of 10 would be more intuitive. Lastly, it is a little unfortunate that area of the display does not overlap with the laser aim point of the reticle. If it did, that would have allowed for an illuminated projected reticle over the top of the etched one. This would be helpful in low light when the thin black reticle becomes basically invisible. It also would have allowed for the possibility of user fine adjustment to the aim point of the illuminated projected reticle. Sure, that would make it not perfectly align with the etched one and that would look weird but it would be worth the strange appearance to have one reticle perfectly aligned.

As with most laser rangefinders, there is likely to be some degree of deviation between the laser aim point and the reticle aim point on the Vector X binoculars and there is no user mechanism to adjust this. Typically, laser rangefinder makers put the QC cutoff for this deviation at somewhere around one mil though, I have no inside knowledge of Vectronix specific QC standards. As such, there is typically substantial benefit for the user in figuring out exactly where his aim point is and making a note of it. This is best done using a square road sign at about 200 yards. You range to find the top, bottom, left, and right edges of the sign and use this data to determine the offset of your laser from the retcle. I then insert a little card into my rangefinder case with a printout of the reticle with the aim point marked on it so I don’t forget. In the case of these test binoculars, that true aim point is .5 mils right and .2 high of the reticle center, this is well within the likely QC standards but also well worth knowing and adjusting to.
Navigating the Binoculars
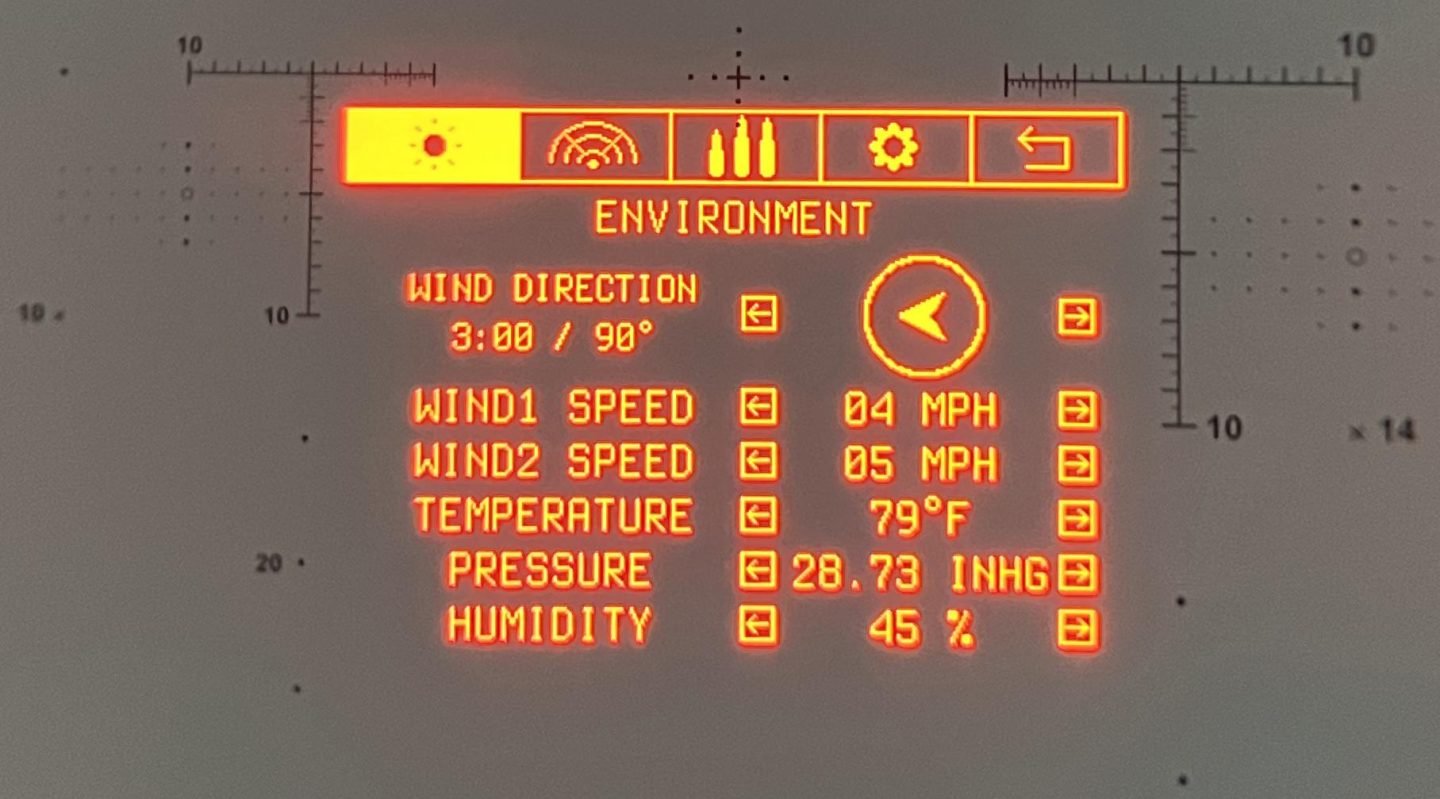
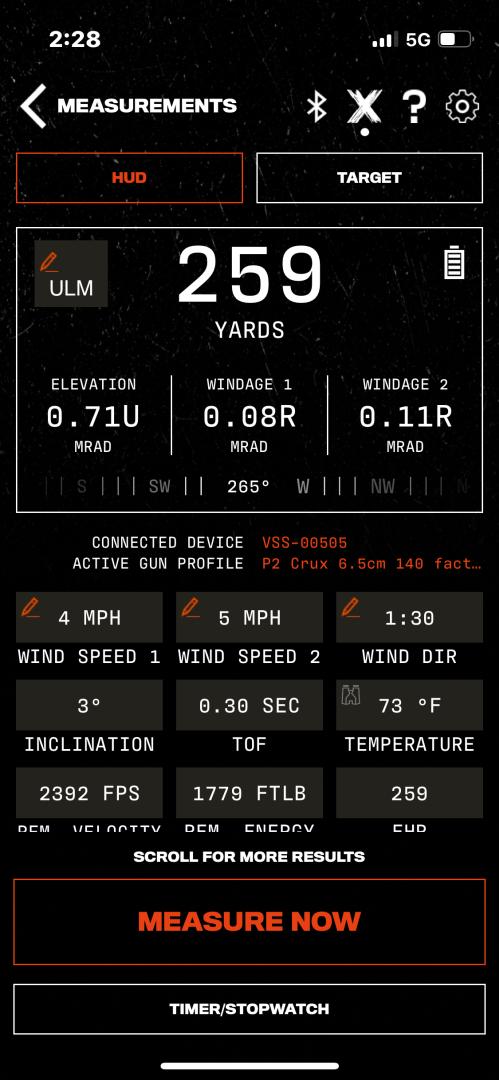
As with other rangefinding binoculars, the Vector X’s have their display in the right barrel only. As with the Sig 10ks, this display is a 304 x 256 pixel AMOLED though it takes up a larger area of the field of view on the Vector X binos and consequently the text appears more pixilated, contrasts less with the rest of the image, and can take more effort to read in bright conditions. The brightness of the text on the Vector X is also not set automatically by an internal light meter as on the 10ks and instead is adjusted by the user using short presses of the forward and backward arrows on the D-pad. Despite the large display area and countless possibilities, the initial pre-measurement ranging HUD screen on the Vector X is quite lacking. It displays the laser mode, bluetooth status, and battery status of the bino but the only piece of information pertinent to the soon to be calculated ballistic solution being shown is the compass heading and that isn’t even a very big piece of that solution. Most of the screen is just wasted with blank lines where the solution information will populate. Sure, on multiple subsequent ranges, this might be necessary as you typically want your last reading to stay up for a bit, but there is no reason to just show blank data before a first reading. Even the blank data itself is maddening, as I see no reason to have a bunch of crap blocking my field of view that isn’t telling me anything. Ideally, I would like this screen to show the ballistic profile loaded, current wind setting, and current readings / settings for the DA, inclinometer, and temperature. I want to see these things before I range so that I can do a last second verification that they are near correct. Sig shows most of these pieces of data on the 10k and I don’t see why they aren’t shown on the Vector X. For the post ranging and ballistic calculation readout, Vectronix actually provides three screens that you can toggle between using the left and right D-pad keys. That is great, but with three screens they only get you slightly more information than you get with just one on the Sig 10k. The primary screen displays the familiar binocular status panel, range, elevation correction, two windage corrections, and compass heading. The second screen reminds you what your windage was set to and adds time of flight and inclination. You can also quickly adjust the wind speed magnitude for your next range measurement from this screen using the up and down D-pad keys. The third screen reminds you what ballistic profile you used and gives you the remaining velocity, and remaining energy. I really like the double wind setting that you get with the Vector X. It allows you to make a full windage bracket to represent the range of wind values you believe to be happening and have that whole range displayed to you so that you can make your to-the-second estimate of where you are in that range more easily. In that respect, the primary measurement screen on the Vector X is great. It gives you everything you need and nothing else. Those secondary screens leave something to be desired though. They do not re-hash what your atmospherics were so you can’t verify that say your temperature isn’t way off because you forgot and left the temp on sensor and the binos are now 105 degrees in the sun. I like the addition of time of flight and the velocity and energy readings are also great but I think max ordinance could also be added. You have two extra whole screens for this type of information so really nothing should be missing and the majority of those two extra screens need not be devoted to re-hashing the range measurement from the primary.
Vectronix has spent a good deal of time and effort in making an in-bino menu system that is intuitive and thorough as well as an interface to that system that is fast for competition use. The Vectronix Vector X manual online goes through almost the entirety of this system and I recommend it especially to competitive shooters who want to see exactly what the potential workflow will be as I know how important that can be. It is a very good and very thorough manual. I will stick to the highlights and generalities here in order that this section doesn’t run to ten pages of tedium. The manual text itself is unfortunately not included in the app. Despite the massive capacity of memory our phones now have, the app links to the manual though it’s menu system instead of containing the manual within the app. I don’t understand why Vectronix and others do this. The manual may be needed by people outside of cell signal range and takes an insignificant amount of memory to include. Incidentally the online manual linked is actually a pdf. As such, you can easily download it and save it to your phone for accessibility offline. Something I whole-heartedly recommend. It’s only 7mb in English so, I guess it will cost you about one photo worth of storage capacity to do so.
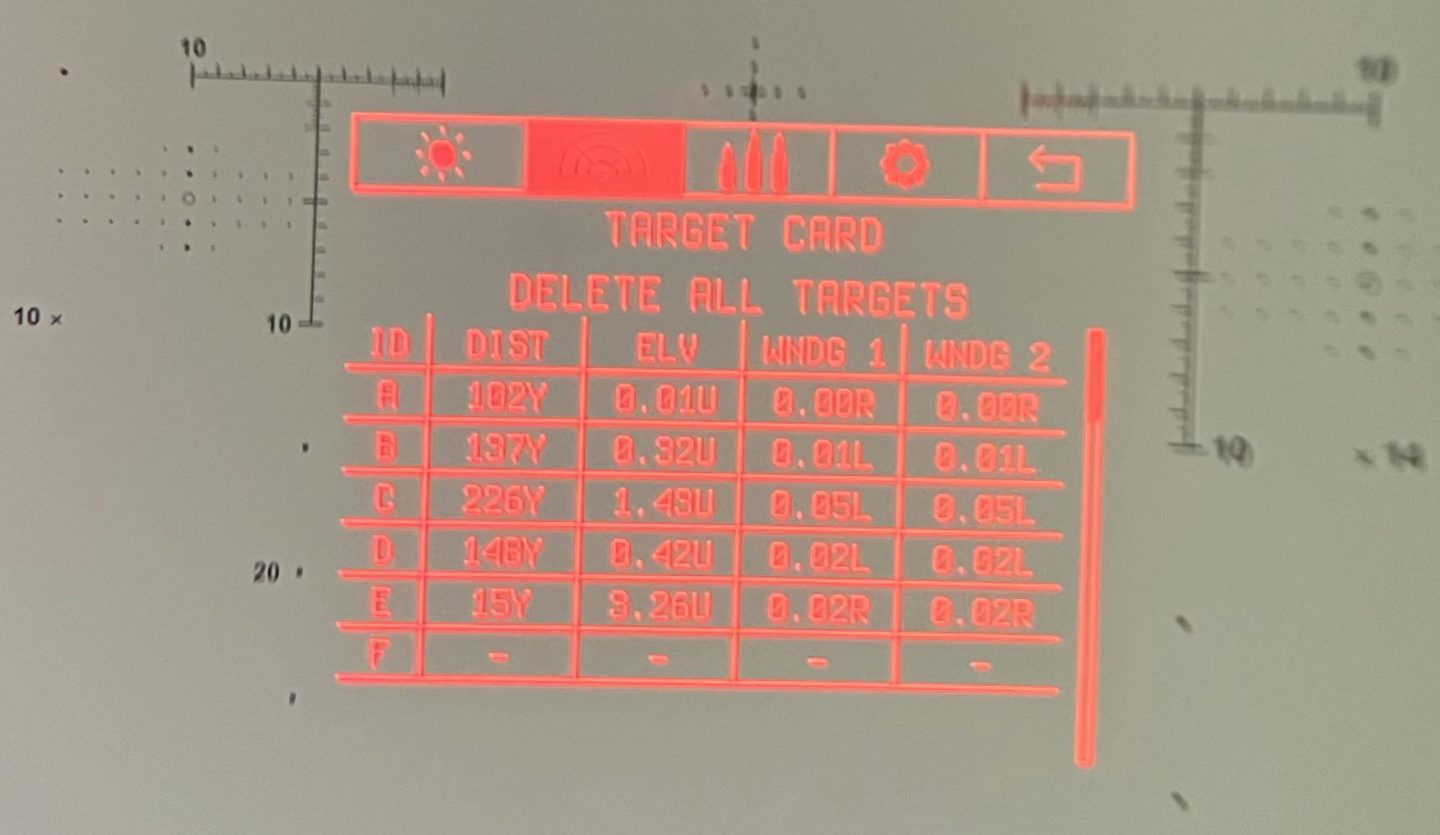
The Vector X in-bino menu actually utilizes its own little GUI with icons for environmental, target card, gun profile manager, and settings. These are very easily navigated using the D-Pad buttons. A few highlights are how quickly and easily you can change the source of environmental data from the binocular sensors to manually entered or local weather station when you need to such as when the binos are heating up in the sun and consequently show an erroneous temperature. The Vector X binos also have the ability to create a live target card in the binos populated by actually ranging the targets using the rangefinder and without connecting to the app. This is done using one of the D-pad shorcuts activated from the main HUD ranging screen. These shortcuts are:
1) Quick tap of the up and down keys -> Make display brighter or darker
1.b) Quick tap of up and down keys when specifically on HUD screen 2 (the wind screen) -> Change the magnitude of Wind 1
2) Quick tap of the left and right keys -> Cycle through the above mentioned different HUD rangefinding screens
3) Press and hold of up key -> brings up a timer / stopwatch menu
4) Press and hold down key -> brings up a laser mode change screen
5) Press and hold left arrow key -> brings up a bluetooth on / off menu
6) Press and hold right arrow key -> brings up the target card creation by ranging menu
That is a lot of shortcuts and I think match shooters and range officers will certainly find an advantage in some of them. Range officers at matches will now have a timer / stopwatch feature option built into the binoculars they are using to spot. And competitors may find competitive advantage in the speed and ease with which you can get to and create target cards using the rangefinder. I understand there also exists connectivity between the Vector X rangefinder function and some of the gun and wrist mounted displays that match shooters are using such that the binos will download their data directly to those devices.
Optical Performance:
Without question, the optical performance of the Vector X was the biggest surprise of the review for me. It’s not that they didn’t tell me it would be good, they did. Everybody says that though. Seriously, on almost every optic I test the marketing people tell me the glass is excellent and I’m going to be blown away. They say this with such conviction and, to be honest, I don’t think they are lying to me. I really think they believe it. Of course, most glass is average, that is what average means. Average is what you have the most of. Now, you might rightfully argue that average glass these days is really good. That is true. Great glass today is not a whole lot different than great glass twenty years ago but average today is a tremendous amount better than average twenty years ago. That being said, average does not blow anyone away because you see a lot of average. Anyhow, the Vector X binos are not average. They are competitive with the Leica Geovid Pros that I reviewed two years ago and that puts them in the top teir for optical performance in LRF binos.

Specifically, I found the Vector X binos to have slightly better resolution than the Leica Geovid Pro binos using magnification compensated optical test targets (my Geovid Pros are 8x and Vector Xs 10x). Vector Xs also boast a significantly larger field of view than the comparable Geovid Pro (10 x 42) model (Note: since the time of this review published statistics on one of these binoculars FoV appear to have changed and the Vector X is listed at 333ft@100yd and the Geovid pro 10×42 is listed at 345ft@100yd giving the Geovids the edge) and the Vector X and Geovid Pro have comparably excellent handling of chromatic aberration. On the other side of the coin, I found the Geovid pro to have better color rendition and slightly better edge-to-edge clarity than the Vector X. This color rendition difference is due to the stronger notch filter necessary for the AMOLED display in the Vector X vs. the segmented LED in the Geovid Pro. While conditions are very rare in which you can notice any blue tint in the Vector X binos in real world use, you can synthetically do so by looking at a white wall with just one eye open and alternating looking though the right (has a notch filter), and then the left (does not have a filter) barrel of the binoculars. You can do this with both the Vector X and the Geovid pro and you will notice that even though you do not perceive it in day-to-day use, the Vector X does have a substantially stronger notch filter than the Geovids. This is nessecarry for the AMOLED screen to function but the stronger the notch filter is the more the colors appear more muted and that is why the Geovids color rendition is superior. Neither the Vector X nor the Geovids appear to contain field flatteners such as are in the Swarovski EL range and both show a comparable amount of barrel distortion but also have the more three-dimensional appearing picture characteristic of binoculars without field flatteners. All told, the Vectronix Vector X and Leica Geovid split important optical measurement metrics pretty evenly and I feel confident saying they roughly equal in overall optical performance. This came as quite a surprise to me as I consider the Geovid Pros to be top tier in optical performance for a rangefinding binocular. Such performance from the Vector X is tremendous and also bodes well for it’s non-rangefinding brother the Radical X that sports the same optical design less the notch filter.

Laser Performance:
The Vectronix Vector X sports a 905nm Class 1M “eyesafe” laser with 1.8x .1 mrad (8x and 10x) and 1.5 x .1 mrad (12x) beam divergence. It is listed as having a 7,000 yard maximum range on reflective targets, 3,000 yards on trees, and 2,400 on deer. Its accuracy is listed as +-1m to 100m, +1 2m to 500m, and +- 5% over 500m. Vectronix lists an unusual amount of such technical specification in it’s manual for those interested. Similar to the Sig 10k binoculars, the Vector X is using what I would classify as a next generation laser rangefinding engine. It is not identical, but the same concepts of more data points spread out over a larger time frame with more time in between coupled with more advanced signal processing of the returned data are being utilized.
One important note before we get into my test data and direct comparisons with the Sig 10ks and other rangefinders: The Vector X unit I have is a late stage engineering sample with FPGA firmware that differs slightly from the production versions now shipping. The rest of it’s firmware has also had a number of updates throughout the testing process and these doubtless have, and will continue to have, some effect on signal processing. For instance, the FPGA firmware in the Vector X unit I have processes noise heavy data more aggressively then the version being shipped. It thus delivers more long-range readings in noise heavy inclement conditions but also more false readings in those same conditions. I will clarify this. Occasionally, on longer ranges, roughly 2,000 yards or further, in bright and hot conditions, the unit I have will miss-interpret background radiation as signal and deliver a false, and always further than actual, distance reading. These phantom readings are always further than the true distance and do not appear consistent from measurement to measurement. As such, if multiple ranges of the same point are taken, they stick out as the big numbers who have no twins whereas the correct range will be smaller and have multiple readings registering near identical distances. Production units will yield fewer of these phantom readings but also fewer of the true far distance readings under these difficult conditions. You may even never see such a phantom reading as I have not seen any with Sig 10k binoculars that use similar data processing. During the first day that I did long distance rangefinding, a particularly challenging day in terms of conditions, these phantom readings were relatively common. They were perhaps one in five readings for targets over 2,000 yards. With each software update for the Vector X, they have become less common to the point that I had only one on my last ranging trip so I expect that you will see few or none. On the other side of the coin, I have not seen a tremendous reduction in the ranging capability that I am seeing and all of the range generalities I will be relating are true of the newest software iteration though still with the unchangeable prototype FPGA version that I have.

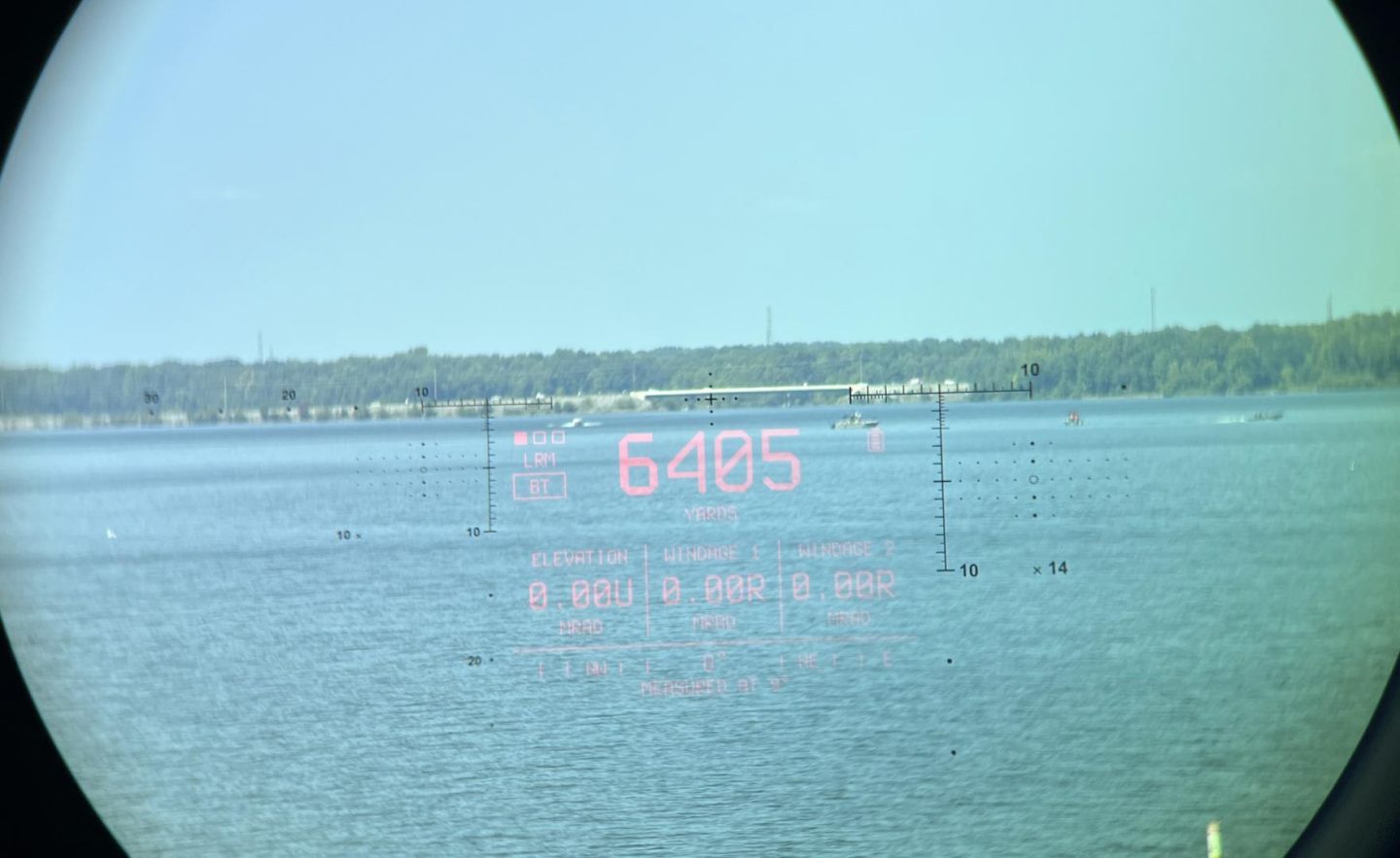
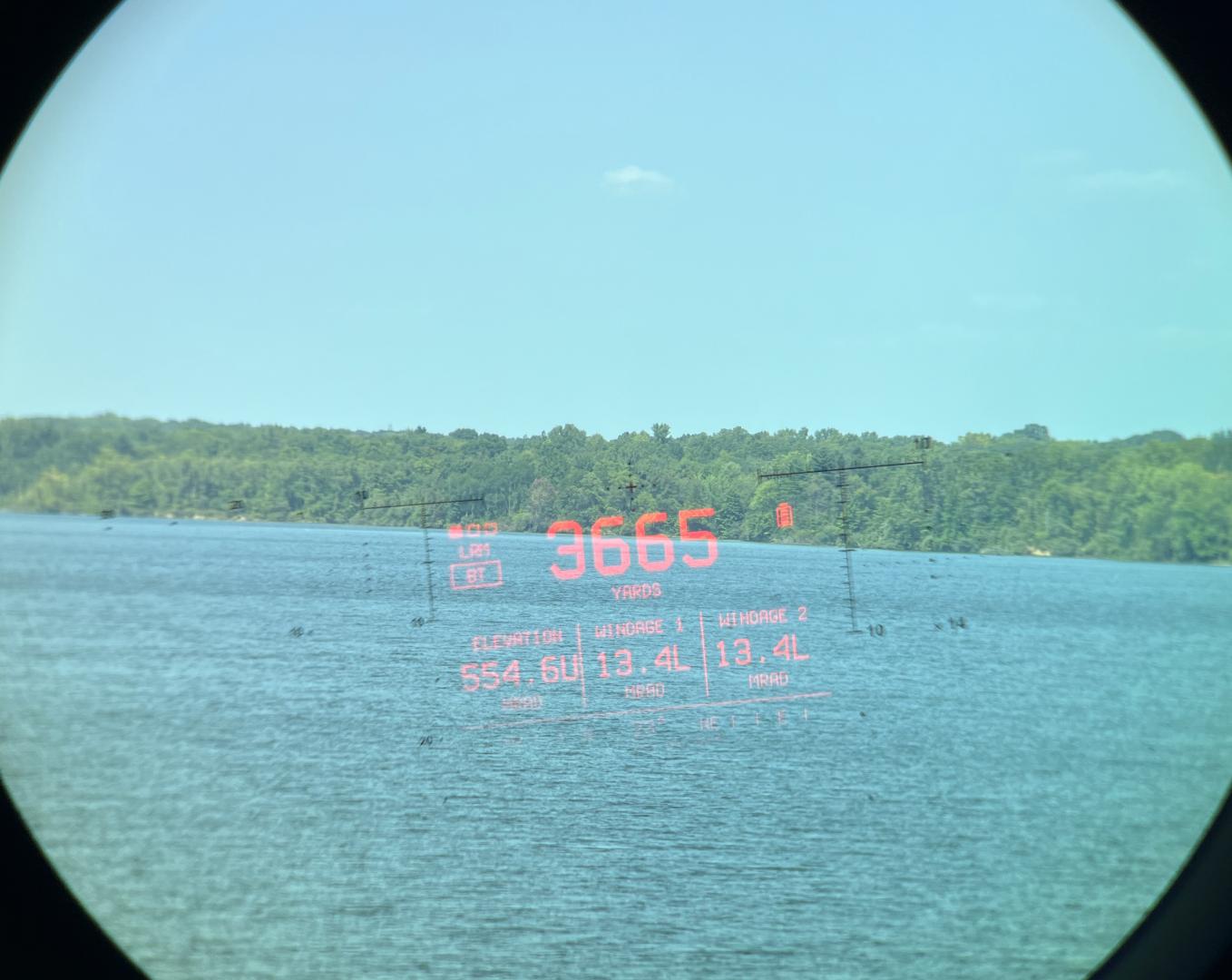
Now for some actual performance numbers and comparisons with the Sig 10ks and Leica Geovid Pro 32s. Vectronix claims 7,000 yards for a maximum reflective target range. I have hit 6,405 on a bridge on a bright sunny day. I was unable to duplicate that on either generation of 10k binoculars on the same day and, in fact, I have never been able to range that bridge with the 10k’s though I have been trying with the first generation pair for a couple years and have made attempts with some on cooler overcast days that were easier ranging conditions. Of course, the Geovids appear to have a hard range cap of ~3,000 meters due to memory limitations so they can’t range that bridge in any conditions. The Vector X’s binoculars do not always outperform Sig 10ks on hard targets though. At night, which is the ideal condition for a laser rangefinding binocular, the Sig 10k’s will range an industrial tower at 9,556 yards every attempt. The Vector X cannot register this range despite not being hard memory limited at that distance. As for the claim that the Vector X can range 7,000 yards maximum on a reflective target, I would say judge that is accurate and is likely even true during the day on a moderately overcast day given a shaded surface of a highly reflective target.
The second Vector X claim is 3,000 yards on trees. This is pretty easy for the Vector X binos. In fact, I have returned readings closer to 4,000 yards on tree lines on hot bright sunny days. 3,000 yards on trees is much closer to a worst condition scenario than to a best case one for the Vector X. Under these same conditions and on the same targets, the Sig 10k performed essentially the same as the Vector x. Since this tree line surrounds a massive reservoir in such a way that it exists similarly at pretty much any applicable range, I was able to be very precise in this comparison. The Vector X and Sig 10k’s topped out within a hundred yards of each other making this target type in these conditions the most similar performance comparison for the two binoculars. These tree testing days were late in the testing process as well. So, the Vector X were using the most up to date firmware at that time. For reference, the Leica Geovid Pro 32’s top out at about 1,850 on trees in direct sunlight.
On what I would have thought a similar target, grassy hillsides, both competitors lag their tree ranging numbers. When targeting hillsides, on a different cloudless, hot day. The Sig topped out at 2,000 yards whereas the Vector X was able to get 2,750 admittedly with a lot of phantom ranges along the way. This difference in performance was the most dramatic I have seen and was also on the earliest firmware with which phantom ranges were also pretty common for the Vector X. Nevertheless, most of the time the Vector X seems to still have an advantage over the Sig 10k on hillsides in very sunny, and hot weather. This advantage is less pronounced on the later software but it is still present and phantom ranges are quite rare now even with the engineering sample FPGA in my unit.
Vectronix last claim on rangefinding performance, and the most difficult to test, is 2,400 yards on deer. I can give you 1,962 on a bison. Is that close enough? What I can say is that furry living critters have generally proven easier to range than equivalent sized bushes. That being said, they are smaller and, as they get further away, you eventually get to the point that more of the beam passes around them than actually hits them and signal processing gets more complex. For what it’s worth, 2,400 yards on a deer does not strike me as particularly challenging for the Vector X binos and its performance on living fleshy targets was equal to that of the Sig 10k’s on all of the mammalian targets I was able to test both binos on. It is likely that differences do exist between these two but ranging living things is subject to them being there and being seen and data points are therefore limited enough that the gaps between them are larger than the differences between these binoculars.

One last note on the Vector X laser performance. The Vector X only has three “target” or “laser” modes. These are basically long range, a general best target type mode, and a limited duration continuous scan mode that is actually the Vector X’s highest performance mode and is initiated by holding down the ranging button. They do not have a first target, last target, or any specialty mode like fog / snow. With lasers beams being as tight as they now are I have not typically found most of these modes to be very useful and I can tell you the Vector X ranges well in fog or driving rain. Though it is a minor consideration, I have found fog mode to be something of a miracle worker on the Sig 10k’s in heavy snow. I obviously haven’t used that mode much, but it was crazy impressive when I did.
Other Onboard Sensors:
As with other laser rangefinding binoculars, the Vector X comes with a suite of other sensors in addition to the rangefinding laser. There is an atmospheric pressure sensor, temperature sensor, humidity sensor, angle of inclination sensor, and a compass. In the future, you will also have the option of adding the wireless Calypso AB edition ultrasonic wind meter. Some of the appeal of an all-in-one rangefinder and ballistic solver is that all these sensors can be automatically integrated into the calculations for greater accuracy, speed, and translatability from wherever you zeroed the rifle and practiced to wherever you are hunting. To do this though, the sensors have to be reasonably accurate. I have therefore tested them with a degree of rigor in line with how accurate they need to be to fit their function. That is to say, I tested them to make sure they were ballpark enough because they don’t have to be super close to be good enough for the ballistic calculation. I tested the temperature sensor on a few occasions and found that it was within 5 or so degrees of the local weather data. As with most such sensors it acclimates slowly and is subject to error if the device heats up from direct sun exposure. As such, Vectronix gives you an option to lock in a manual temp or grab one from a local weather station. The atmospheric pressure sensor is not about to help you predict and oncoming storm front but seemed to be within about 1inHG. This translates to roughly 1,000 or so feet or so of elevation. Also, not particularly useful in predicting the weather is the humidity sensor. This sensor also has only a small effect on the ballistics and it does not appear to be particularly accurate saying things like 59% humidity an hour after rain when the local weather station reports the more expected 90% value.
The Vector X’s also have an angle of inclination sensor. This has been pretty spot on when tested. They must not have trusted it too much though as the surveying ranging mode present in the beta software that was heavily reliant on it has disappeared from the live version. This is too bad. It was a fun tool to play with that had at least entertainment value.
Lastly, we will talk about the always-finicky magnetic compass. In the Vector X, as in most LRF binos, these things are chip sized and very sensitive to small electromagnetic disturbances surrounding them. The Vector X binos are unique in that they are basically constantly running a compass calibration and keeping tabs on how well they think they know which way they are pointing. If they think they are poorly calibrated, they prompt you to do a step of rotations outlined in the manual by showing a chicken dance icon in the upper right of the HUD. This is because of the humorous similarities between the motions of someone doing the chicken dance and someone doing a compass calibration. All of my testing was done when no such icon was prompting. However, the manual was not published at the time of my testing and so I did not follow exactly it’s set of steps. I slowly rotated and flipped the binoculars as past makers have prompted me to do until the chicken was happy and left me alone. In any case, the compass function in LRF binos has little effect on ballistics as the effect in calculates, Coriolis, is a remarkably small effect at small arms distances. Not small is the compass effect on the remote point GPS maping features that hunter’s find quite useful in locating a starting point for a blood trail to recover harvested animals. More on this will be found in both the smartphone application section as Vectronix has an excellent in-app tracking function. The Vector X manual lists the Azimuth accuracy of the compass at +-5 degrees. Perhaps that is true of the chip in proper lab settings but in the field it was not. Most of the compass varied more like +-10 degrees for a series of measurements that might themselves be center on +- 10 degrees from the actual azimuth meaning that the correct heading may or may not lie within a spread of readings and an individual reading could be as far as 20 degrees from the actual heading. This is similar to the Gen 1 Sig 10k’s compass performance and about twice as inaccurate as the Gen 2 units or the Leica Geovid Pro. I found this lackluster performance surprising as Vectronix has the best in-app tracking function of the three I expected its constant calibration chicken dance thing to deliver better results than it did.
The Smartphone App(s)
I have now had the opportunity to test four different flavors of the Applied Ballistics smartphone app. For the most part, these are different re-skins of the same underlying code. The Applied ballistics calculation engine, device interface protocols, and ballistic library don’t change based on what application is being used and, as such, when I have found bugs in the program in the past, these bugs have often, though not always, spanned several different companies’ applications. That being said, the user interfaces of the four AB applications I have tried have some major differences and you are tied to the one that corresponds with the specific maker of your device. As such, the app is an important part of the device buying decision and, in my judgment, the Vectronix application is the best of the bunch.
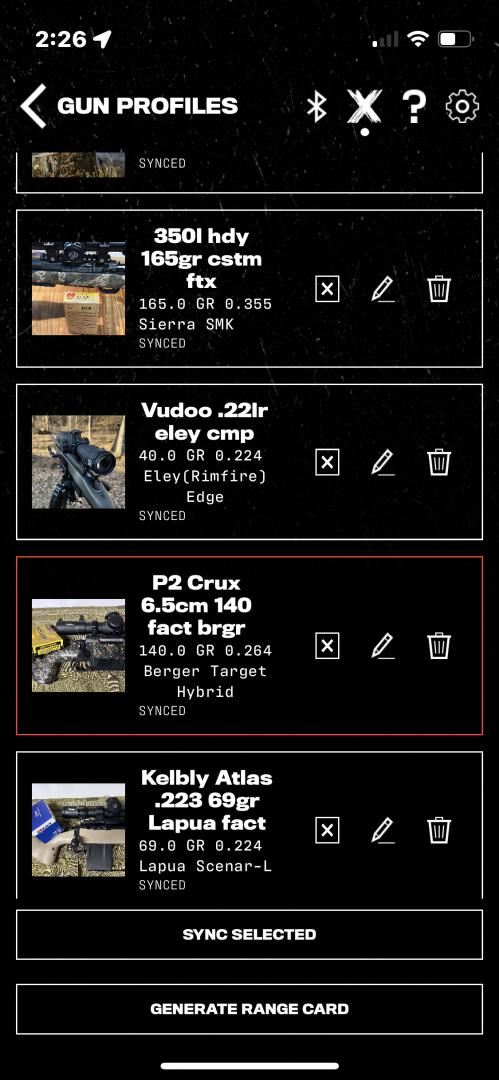
My judgment of its superiority, is due to a combination of better and more intuitive organization, additional features, and fewer restrictions on how and when features are used. The organization of the VECSS app starts out with the first function you will ever use, paring, right at the top. It then proceeds to measurements, the one you will use most, environment, likely the next most, and on down in the order I would expect. The sub menus are also well organized and intuitive to navigate. Specific features, such as truing a profile, are not locked into use only while actively ranging, and I did not encounter any restrictions on truing distance that might interfere with truing a slower cartridge at the applicable distances. The VECSS app was also not constantly prompting me to connect my rangefinder to use elite features whenever I was messing with a profile so there is likely a 30day timer on this verification function as is the case on the Leica instead of the requirement to connect every session as with the Sig. That is nice as I don’t want to have to dig rangefinders out of the safe to spitball stuff with the ballistic calculator on my phone. The VECSS app even has the nice feature of allowing you to add pictures to your ballistic profiles so you can drop in an image of the rifle or perhaps the applicable ammo box. It’s not world changing, but it sure looks nice.
I think the active range finding screen on the phone will be judged as particularly useful by the competition crowd. It has a timer pop up on the bottom that covers just the bottom environmental section of the screen allowing you to range targets while seeing the time. The rangefinding screen also has a shortcut to the target card function.
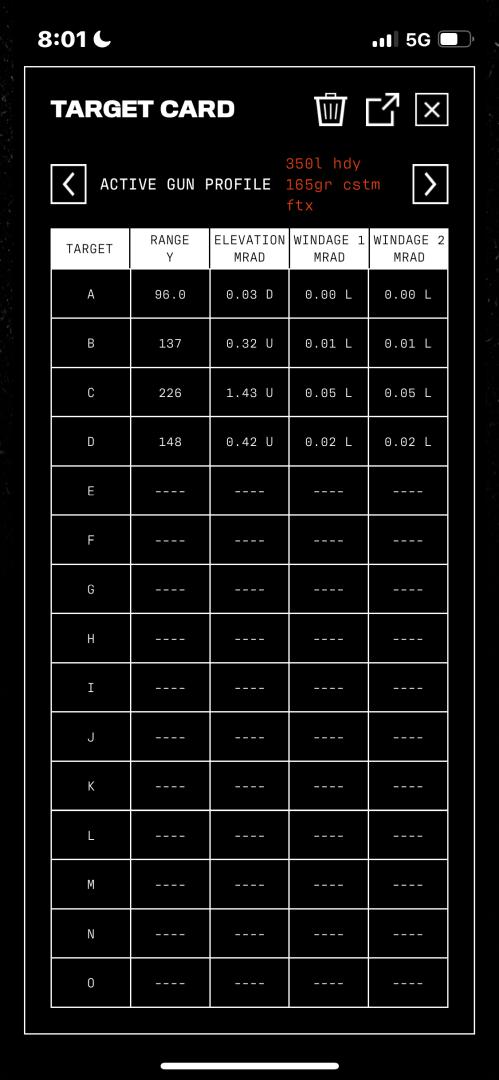
This brings us to the main new features VECSS brings to the table. These are a range card created directly with measurement data and a GPS mapping remote point feature built directly into the VECSS application. That target card button in the app’s main ranging screen is one of two ways you can enter targets into the target card by actively ranging them. You can do this from that target card tab in the smartphone app ranging menu or by utilizing the binos shortcut of holding down the right D-pad key while the binos are on their main ranging screen to enter the target card creation screen in the binos. Targets added in either way show up on both devices target cards. It is also my understanding the target card will also be able to be transferred to an E-DOPE card when this connectivity is added at the end of this year.
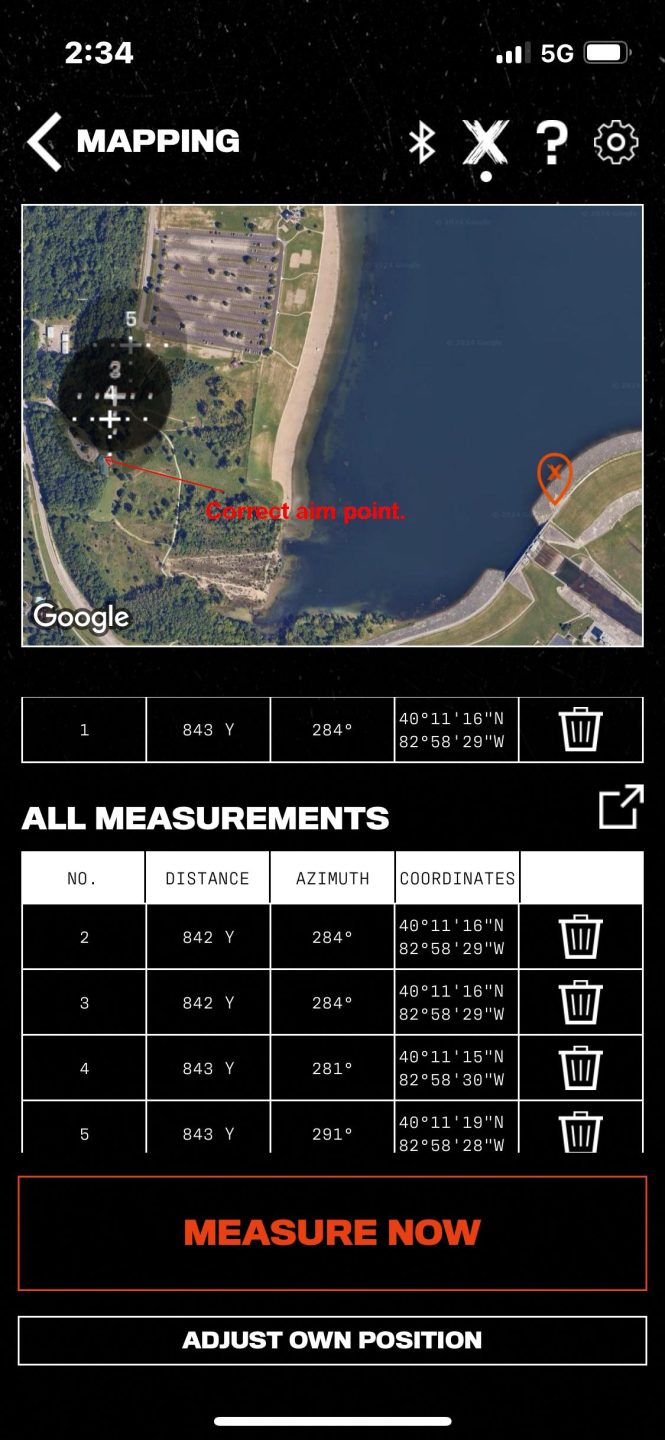
The second major feature VECSS brings to the table is full in-app integration of the remote point maping function. This brings the Google map right into the VECSS application and saves and displays the last five ranged points as well as your location. Most other rangefinders have instead had an export-ranged point function that then transferees you out of the application to Google, Apple, or onX. Alternately you could range from within another app such as BaseMap. Having the function directly in the VECSS app is nice. For those wondering, I did try maping in an area with no cell service. The point ranged, and your current location will show up but they will not be on a map, just a blank background. Technically, this could still be used to navigate you to the point, you just won’t see any overhead view of surrounding features to aid you.
I’ll finish up this section talking a little about the other devices and applications that the Vector X can connect to. I have already mentioned E-DOPE cards for target card display and Calypso model AB wind meters for wind measurement. The Vector X literature also mentions Kestrel units for wind and environmentals, a number of Garmin watches, BaseMap, and Hornady 4DOF and Desert Tech Trasol for alternate ballistic calculations. Some of these device interfaces currently work, some are partially working, and some do not yet have functionality but are slated to by the end of the year. For instance, at the time of writing, Hornady 4DOF, Desert Tech Trasol, and the Calypso AB device do not yet interface with the Vector X or VECSS application. I have tested these, but I do not have a number of the other devices to test. I understand that connectivity is in varying states of completion for these devices.
Range Enhancers and other aftermarket accessories
The thread on 40% magnification boosters known as the “range enhancers” that Vectronix designed for the Vector X binoculars are doubtless the most important aftermarket accessory and I expect that most users will likely be purchasing them. Due to production delays, they will be available in November or December. The mag boosters are so central to the design of the Vector X that the most popular reticle design, the DMR, has half of its measurement grid calibrated for use with the mag boosters attached. Attached, the mag boosters convert the 8x Vector X binos to 11x, the 10x to 14x, and the 12x to 17x. The idea of this is that, in concert with the barrel mounted tripod interface, this converts the Vector X or Radical X binoculars into a dual eye spotting scope replacement for spotting and calling a partners shot. Using high powered binoculars for this purpose has become a popular practice as having both eyes on a shot yields a better ability to clearly spot the impact and / or trace and this is judged by most competitors as superior to the higher magnification present in traditional spotting scopes. Getting to this magnification via thread on mag boosters instead of natively gives the binoculars the ability to either be used with mag boosters attached on a tripod as spotters or without as handheld as field binoculars at a magnification manageable for that less stable position.

Physically, the mag boosters are about 2.75” long and thread to the front of the binoculars using very fine M46x.75 threads. The threads are very fine and consequently difficult to position just right to get started. Be careful and patient in this operation. The mag boosters can be used in concert with the included objective flip caps but not the thread on Tenebraex ARD as they do not have threading on both ends. When I tested the mag boosters optically, I found them excellent. They were able to resolve test targets properly scaled for the higher magnification at the same resolution as the native binoculars resolve the un-scaled target. They also did not add significant chromatic aberration and did not seriously degrade edge to edge performance or add a bunch of pincushion or barrel distortion as I have seen in the past with other similar mag boosting devices. That is good, as they are quite pricey and, at that cost, I would expect good performance. As far as effect on laser performance, I did not note significant changes to ranging performance in my testing with the mag boosters attached. The Vector X binoculars do barely fit in the carrying case with the boosters attached though I would not recommend storing them attached as you are creating a dead air space that could foster condensation and mold growth in that trapped air between the two. The Mag boosters should be detached for storage and they have their own nice little case for the purpose. My judgment is that the extra spotting scope function the mag boosters provide, at least for the 10x and 12x models of Vector X is well worth the substantial cost. It’s a killer extra use configuration.

The second accessory I would like to talk about is the ARCA plates by RRS and Area 419. These mounts replace the little plastic 1/4×20 tripod adapter included with both the Vector X and Radical X binoculars with full ARCA plates. Both of these are aluminum and thread directly into the magnesium main tube with four very small machine screws in the same way the included factory mount does. The RRS ARCA adapter has a cant adjustment built in for use with video style tripod heads that do not have cant adjustment. Its main downside is that the cant adjustment protrudes into the area where your thumb grips the binos making them less comfortable for one hand use. The Area 419 version has no such adjustment and therefore lays a little flatter, does not interfere with your thumb grip on your right hand, and costs less. In practice, these ARCA plates are a bit less comfortable for holding the binoculars than the lower profile factory mount or no mount (an option as there is an included plastic cover for the mounting area.) However, they provide a very steady mounting point that is much more solid than a traditional binoculars bridge mount and much lower in profile than strapping on a cinch mount. Of course, both the RRA and Area 419 mounts are manufactured to very high standards as such as these two manufacturers’ products are well known for.

My concern for both these ARCA mounts is that they are both quite robust and connected to a comparatively fragile magnesium main tube by inflexible steel machine screws. I am concerned the binoculars could be damaged at this attachment point during a tripod fall or perhaps even if the user torques on the binoculars to lever a too tight tripod head into position in the manner you often position a stiff tripod head when shooting off it using your rifle as a lever. I caught myself absent-mindedly doing this more than once when using the binoculars and was horrified to realize how much force I was applying to such small screws into magnesium on a $3k binocular. Other users have variously suggested purchasing nylon replacements for the included steel screws or simply using a cinch mount as with other binos. Depending on the failure point, the nylon fastners might work well or, they might break off in the bino after saving it and be difficult to remove. The cinch is obviously a proven system though a bit bulky and some have crushed binocular tubes by over tightening them as well. Ideally, I think an ARCA mount should be made for the Vector X from a stiff, brittle plastic with built in calibrated sacrificial failure points such that the mount would break instead of the binoculars in the event of an over-torque event. All of this is, of course, speculation. In practice the mount works quite well, it just strikes me as a risky design.

The last launch day accessory to be discussed is the Tenebraex ARD flip caps. These carry the massive price tag you probably expect from Tenebraex. In fact, despite containing no optics, they are almost as expensive as the mag boosters. The ARDs thread onto the Vector X binos using the same M46x .75 threads as the mag boosters and the plastic flip parts of the cap have a stiff, indexed interface with the aluminum portion that allows them to be rotated to flip the direction you desire and stay in that orientation. They also latch securely enough that they will not inadvertently flip open (or pop off for that matter) when removing the binos from the case as the factory flip covers do. Beyond testing the basic ranging function with them, I’ll admit I did not spend enough time testing on their effect on rangefinding performance to note any differences. Vectronix statement on the matter is that you will see decreased maximum ranging performance when using the ARD. I expect this too be most dramatic in the lowest light and therefore most ideal rangefinding conditions. Notably, these are also the conditions in which an ARD is of the least use. I expect when using the ARD, you might see an improvement in the binoculars’ optical performance in conditions where sunlight would otherwise directly strike the objective lens of the binoculars. Sunshades and ARDs always improve optical performance in such conditions and sometimes quite dramatically. The Vector X binoculars fit in their case with the ARD attached quite easily. The bottom line is that the Tenebraex ARDs are very well executed, a bit cumbersome to put on and take off if your regularly if you swap them out for the mag boosters, and embarrassingly costly. You know, like all Tenebraex products.
Summary and Conclusion:
There is no doubt that the Vectronix Vector X is a feature-laden product. It combines binoculars, a rangefinder, a spotting scope (with range enhancers), and a ballistic calculator all in one. The implementations of many of these features such as the onboard Applied Ballistics Elite and the 304×256 pixel AMOLED are top of the line solutions. It also features a particularly robust slated ecosystem of supported connected accessories and software though, at the time of release, much of this is not yet online.

The biggest surprise to me in testing the Vector X is that its optical performance is on par with Leica Geovid pro binoculars making the Vector X a top tier rangefinding product in terms of optical performance. The glass is downright excellent and not diminished though the addition of the 40% magnification boosters that, when attached, transform the Vector X into an excellent spotting scope replacement. When the dual magnification DMR reticle is chosen, that spotting function includes a second etched graduated reticle to work in concert with the magnification boosted binoculars giving you a properly graduated reticle both for when you are and when you aren’t using the magnification boosters. This gives the binoculars excellent dual competition and hunting cross-over use.

Further facilitating that competition use is a dual in-bino / in-app target card system that allows the user to quickly create a target card by actively ranging the target and have that card sync between the binoculars and the application with capability to also be shared with a 3rd party E-DOPE card. There is likewise a timer function both in the phone application and in the binoculars. Overall, these features, a better and more intuitive app layout, and in-app full remote point gps functionality make Vectronix version of the Applied Ballistics application my favorite of the many flavors I have tried.
In range finding performance the Vector X is the first eyesafe 905nm product to challenge the Sig Kilo10k-ABS in rangefinding performance. Given that I am reviewing an engineering sample not identical to the commercial ones in firmware and that the Vector X and Kilo 10k traded the performance crown back and forth depending on the range conditions, I would not say one outperformed the other but that they are comparable and that, together, they represent the top tier in laser performance for eysafe 905nm products.
I would love to say that the warranty coverage matches the rest of the performance of the Vectronix Vector X. However, at only 3 years on electronics and 10 years on glass it massively lags the unlimited lifetime warranty of Sig and Vortex on their rangefinders and the 10 year electronics with 30 year optics warranty the Leica Geovid Pro 32s carry. Vectronix also does not have a good historical reputation for warranty service or for repair ease and availability outside of the warranty. Their reputation did improve some with the Terrapin X a few years back but I still wouldn’t have characterized it as great. The launch of the new consumer division that the Vector X and Radical X releases coincide with should further that improvement. As with the Terrapin X, warranty service for these products is being handled through Europtic, the U.S. distributer and importer for all Vectronix products. They have some minor parts on hand for repair. They also have exchange units that can be provided to the customer in event of emergency as more serious repairs will necessitate the unit being sent over the pond to be worked on by Vectronix. I spoke with the folks at Vectronix about continuing service after the 10 year warranty expires. They plan to offer this though likely at a cost for the consumer.
Background on Ballistics Calculation, Modeling, and Applied Ballistics Elite
This, and the following other background sections, contain background and technical information applicable to a variety of laser rangefinding products. They are not specifically applicable to the products of any one company and may be found in a variety of reviews for products in the category.
For a long time, ballistics calculators have virtually all used the same underlying math, which is essentially based on the measured trajectories of two basic tested projectiles, these being the G1 and G7.

Each software would iterate from these underlying measured trajectories using a comparison factor known as the Ballistic Coefficient. This coefficient established a comparative degree of aerodynamics between the shooter’s specific bullet and the G1 or G7 standard, according to which the formula would stretch and deform the original G1 or G7 measured trajectory to be more like what would be expected from the user’s bullet. This is where the G1 and G7 BC numbers on your bullet box come from and what they mean.

In practice, the typical process using G1 or G7 based software was to measure the velocity of your rifle when establishing your 100 yd zero or when developing a new handload for your rifle, then plug that value along with the BC on the box and your atmospherics into your software to get an initial set of ballistic solutions for different distances. These would of course be wrong by a few tenths of a mil or so as you got further out. You would write down the real field-recorded values and then fudge with the BC and / or velocity until the model being spit out was as close to correct as you could get it. This new model would be helpful in spitting out good numbers for different untested distances or on days with different atmospheric conditions. It wouldn’t be perfect and, with all the guessing and checking, it would take a while to get to, but it would be helpful.
Of course, the model faced some limitations because your bullet is not actually shaped like either the G1 or G7 standard. Its trajectory is fundamentally not just a G1 or G7 trajectory stretched a bit. Furthermore, you are firing it from a gun a bit different from whatever the test gun was in those original trajectory studies, at a different initial velocity. All this matters. The bottom line is that there is a limit to how accurately you can stretch the G1 or G7 trajectories based on just a BC number and initial velocity number, and that limit is not as good as many of us would like it.
Because of this, a couple of companies have begun measuring the trajectories of more projectiles from more rifles fired at more velocities. This is the origin of Applied Ballistics’ Custom Drag Models (CDM) and Hornaday’s Bullet-Specific Drag Models. Software based on these libraries, such as Applied Ballistics Elite, can output better distance compensation values than that which is based on G1 and G7 values because the underlying trajectory curves are those of the actual bullet in question. For more detail on these changes in ballistic calculation, Cal Zant did an excellent article on Bullet-Specific Drag Models and Frank did a couple interviews with Brian Litz and Emil Praslick for the Everyday Sniper podcast.
Additionally, the rangefinding software within commercial rangefinders has also shifted over time: first only offering a few stock options for preset ballistic curves; then allowing you to input your own G1 or G7 based ballistic profile that you had to, by guess and check, true to your actual field results; and now starting with a custom drag model and having a truing function within the software that eliminates the tedious guess and check truing. When using software with a truing function, you simply enter a few of your field results for recorded drop at a known distance and the software fine tunes the custom drag model, typically its initial velocity, to fit your data.
Having spend a good deal of time with Applied Ballistics Custom Drag Models over the last two years I am very impressed with the improvement this engine offers over traditional G1 and G7 models as well as how many bullets have been added to the CDM library and how regularly it is updated. You will now find basically anything used in long range competitions as well as quite a number of hunting bullets. Were talking a lot of bullets, 447 at the time of writing for 6.5mm alone for instance. My experience is that these custom models are significantly better out of the gate than traditional models to the point that (assuming you know your muzzle velocity) they frequently require no truing to be correct all the way out to transonic distance. In the event that you do need to true the velocity, this is much more easily accomplished though the truing function in the software than by traditional guessing and then re-testing as was done in previous calculators. The end result trued up model is also often better than was produced using older G1 and G7 software as I often previously produced models that would be off by a tenth mil or so at some distance and I was unable to remedy this with MV or BC changes to the formula without messing up some other part of the curve. This software has greatly improved my confidence in my data when interpolating or extrapolating to distances I have not specifically gathered dope on or in conditions different from which I gathered the dope in (the LRF binos in question gather data on and compensate for temperature and pressure). I am missing a lot fewer targets, spending a lot less time crunching numbers, and chasing my tail a lot less in miss analysis as well.
Background on How Laser Rangefinders Work
As with most tools in life, a better understanding of the principles behind, and idiosyncrasies of, the tool’s function often results in more skillful use and better outcomes. The purpose of this section is to help familiarize the reader with just what a laser rangefinder actually sees and how it analyzes and conveys this information to the user.
Though a variety of methods can be used to assess distances using lasers, the majority of laser rangefinders, including this one, employ a time-based calculation for distance. What this means is that the pulse is sent out and bounces back, and then the time between these two events is used to calculate the distance. This is easy enough in principle. In practice, however, we’re not talking about one laser pulse but many, and a variety of other factors also complicate this, so the resulting data requires some interpretation. The most important of these factors are beam dispersion, refraction, and background radiation.
Beam dispersion refers to the fact that the shape of a beam being emitted from the range finder is a cone, with the wide base oriented to the target, and not a rod. That is, the beam spreads out and covers more area the further the object being ranged is from the rangefinder. In addition, most rangefinders, this one included, emit a beam that is not round in cross section, but rather closer to rectangular.
In the case of this particular rangefinder, the divergence is .06 mils in the vertical by 1.5 mils in the horizontal. The Sig Kilo 10ks are unique in providing the user the ability to align this beam to the reticle manually within the BDX smartphone app. It is important that you do this as it is unlikely it will be ideally aligned out of the box, just as it is unlikely most other rangefinders will have a perfectly aligned beam. The difference is that you can align the 10k yourself whereas most others you just have to make a mental note on the alignment and live with it. For most makers, a pass for beam alignment on QC means only that some portion of the beam touches some portion of the reticle, not that it is properly centered. Indeed, when tested, the beam on this 10k was just barely touching the edge of this reticle. To center it using the alignment function within the BDX software, an adjustment of -4 in the horizontal and +1 in the vertical was necessary. Being able to do this is much appreciated, as a small misalignment can matter a great deal when ranging small objects far away. In determining your alignment, you can quite easily see the beam with a nightvision system, as the rangefinder’s 905nm beam is in the spectrum the nightvision sees. However, if you don’t have nightvision, as I don’t, there are a couple of ways to figure out the alignment. The easiest is probably to find a nice, flat, small sign roughly the size of your reticle when its a couple hundred yards away and see how far right, left, above, and below, you can aim and still get the range of the sign. I did this with the below pictured rectangular industrial light and adjusted the beam increment by increment within the BDX software to center it. Remember, you can flip the binos upside-down or sideways during testing to be sure not to get returns from the post when you’re trying to find the bottom edge of your beam. Also of note when adjusting the reticle alignment on the 10ks, is that you handle the ranging within the program during the process and not from the binoculars range button.

In addition to alignment, it is also important to understand just how large a laser rangefinder beam will get at longer ranges. At this time, average beam dispersion for a laser rangefinder is something like 2 x 1 mils. This is 7.2″ wide at 100 yards, or 72″ at 1000 yards. With this pattern, if you are trying to range a target at 1000 yards, unless it is an elephant, much of that beam will be reflecting back from what is around and behind the quarry and not the animal or, more likely at that range, steel itself. Most of the time, a rangefinder may receive a signal comprised mostly of light not reflected off of the target. Data analysis will therefore be necessary to pick the target out from what is not target. Similar in effect to this, many targets are not perfectly flat and perpendicular to the rangefinder. Because the beam is broad at the target end, this means that what is reflected back will not be a single sharp signal but a number of different reflections at a number of different distances. If you aim at a hillside, for instance, some will be reflected off the closer bottom of the hillside, some off the further top, and some off everything in-between. A tree will also give a broad reading as it is a three-dimensional object with reflective parts and pieces throughout. What the rangefinder actually sees, therefore, is not to be represented as a single blip at a single distance, but rather a plot of many returns at many distances with a variety of peaks and valleys corresponding to distances at which a few (valleys) or many (peaks) of the laser pulses were reflected back. The rangefinder may carry out all the interpretation of this plot itself or it may allow the user some degree of control. In theory, a rangefinder could also present the entire plot to the user for interpretation, though I am not aware of any models that do this. This Sig 10k, with its pixel-based display, is one of the few that theoretically could, though it does not. It does, however, give you a large amount of choice in data analysis. The rangefinder’s menu includes modes for last (prefer far target), first (prefer near target), best (target with biggest returns), XR (prefer furthest target and more ranging pulses will be sent out over a longer time), and fog (different processing algorithm to minimize erroneous returns.) That is a good deal of choice, and given the excellent menu system of the 10ks, it is easy to access and utilize this function.
Refraction refers to the bending of light through mediums of differing density such as air or water. The pulse sent out by a rangefinder must travel though a great deal of medium before returning. This air will have a variety of different temperatures and moisture contents. It may also contain microscopic or macroscopic water droplets. All of this, as well as dust in the air, will serve to scatter or absorb the laser such that much of the beam will either not hit the target or not return. The effect of this will become more pronounced with distance at the same time that beam dispersion dictates that the beam is more spread out with distance. This works together such that the further an object is, the less signal could possibly be reflected off of it. At some range, therefore, the signal will not be strong enough to be distinguished from the last of your important factors. Additionally, if your rangefinder is of the higher power 1500nm variety instead of the more common 900nm variety (these Sig 10k binos use a 905nm laser), absorption and scattering become a much bigger deal. 1500nm lasers interact heavily with water and so become far less effective the more water is in the air.
Background radiation is omnipresent but varies greatly with atmospheric conditions. At night, if you could see the target to range it, you would not have much of a problem. On a bright day, however, the sun is introducing a tremendous amount of electromagnetic radiation that is reflecting, refracting, transferring energy to objects, and being radiated once again at different wavelengths. Some of this cacophony of radiation will be close enough to the wavelength used by the rangefinder to be picked up. This radiation will form a floor to the possible signal strength returned from the object ranged that could be read.
I have made the following crude diagram of what the user, and the rangefinder, might see in a particular contrived scenario in order to help the reader to understand the type of data a rangefinder might be interpreting. This is not strictly accurate as the rangefinder does not send one beam out and record a bunch of different returns but rather sends out a whole bunch of tiny pulses and records a return for each. In other words, the theoretical return plot I show is much smoother than actual data would look, though the shape is the same. I think this way of depiction is most useful in helping the user to understand what a rangefinder sees, though. It may also help the user, where possible, to present the rangefinder with scenarios where it might have an easier call to make. In other words, to aim to get better returns,sometimes, by ranging easier-to-read items near in proximity and distance to a small, desired target instead of that target itself.
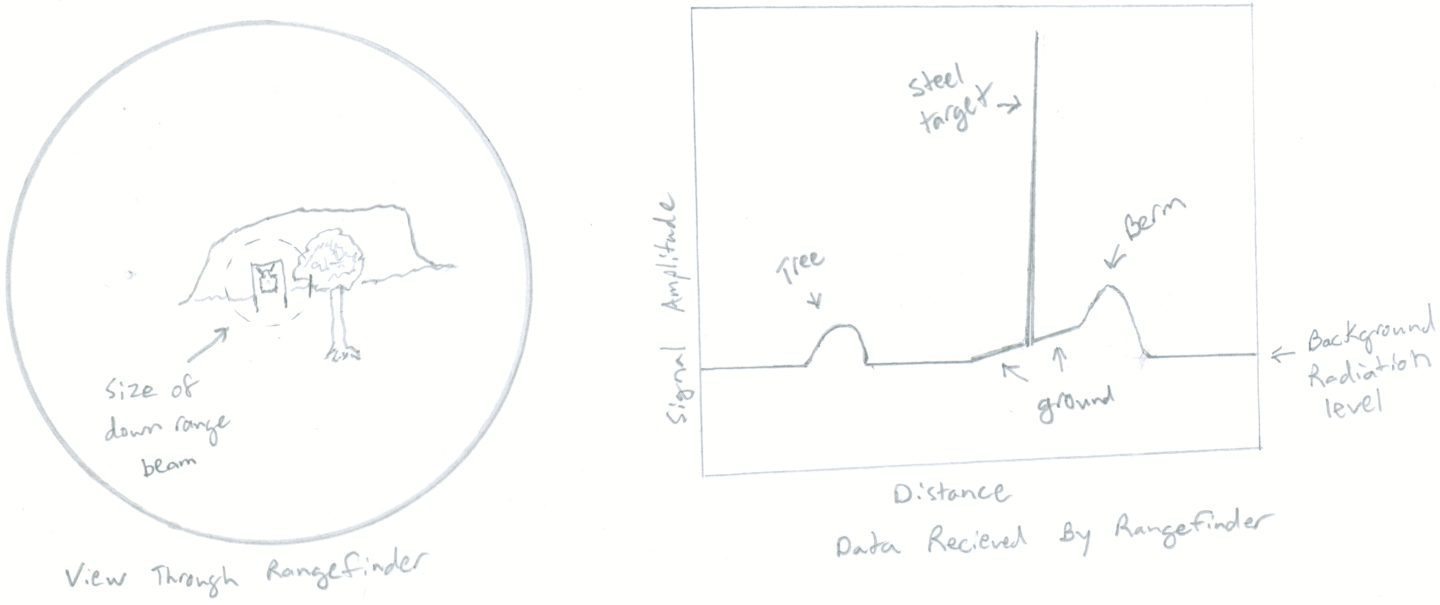
As you study the above diagram and plot, keep in mind the following possible ways in which the data might be interpreted by the rangefinder and how those interpretations would effect the user not only in this example situation, where the steel target is the desired object to be ranged, but in other scenarios as well: perhaps when ranging softer targets against hard or absent backgrounds.
1) A rangefinder might be programmed to display the closest peak in amplitude to the user. This would be the tree.
2) A rangefinder might be programmed to display the furthest peak in amplitude. This would be the berm.
3) A rangefinder might be programmed to pick the peak with the greatest area underneath. This normally corresponds to the object filling the greatest area of the diverged laser beam down range. In this example, this would be the berm.
4) A rangefinder might be programmed to pick the peak with greatest maximum amplitude. This usually corresponds to any object that is sufficiently large, reflective, and mostly perpendicular to the shooter. In this case, that is the steel target.
Most rangefinders are programmed to pick one of these criteria to determine the range from. A few have several modes you can switch between. These typically allow you to set preference for near / first target (tree), far / last target (berm), or highest number of signal returns / best target (berm or steel depending on specific criteria). The Sig 10ks have modes for each of these and these modes are easily found in the binoculars menu system under “Target Mode”.
Background on the Challenges of Getting Optical Performance from a LRF Bino:
Producing laser rangefinding binoculars of high optical quality is a difficult proposition. Nevertheless, this is a very important area of performance because the idea of LRF binos is not just to replace a small rangefinding monocular, but also to replace the binos you use to find and observe your quarry. For such purpose, LRF binos need a lot better optics than the small, dark, heavily tinted view you get through a little handheld LRF monocular unit.
Amongst the difficulties faced in designing optically high performing LRF binos, foremost are the effect of the display on optical performance and how to integrate the laser optic components with those for visible light. You have some tough decisions to make when it comes to coatings as the laser transmitter and receiver are part of the optical system, in the right barrel. The laser wavelength used, 905nm, is just outside of the visible light spectrum. This laser light must both pass through and utilize much of the optical system used for the visible light traveling to the user’s eyes and be diverted from the rest of the incoming light at a point to be redirected to a receiver positioned in the barrel. Obviously, this is a coatings challenge.
The other main optical challenge of laser rangefinding binos is the effect of the display on optical performance. There is simply no way to put a display bright enough to see in the optical path without some diminution of transmittance. Furthermore, to a great extent, there is a direct tradeoff between how bright you can make the display and what percent of incoming light the binoculars can transmit to your eye. If you’re willing to have an image through the binoculars that is dimmer, or, say, blue-tinted, your display can be quite bright. If you want the image bright and untinted, however, you may have to go with less display brightness and probably simpler, larger, illuminated digits. The reason for this is that your display basically works by bouncing the display image off a lens in the main optical path. This requires some semi-reflective coating, as on a holosight or red dot. These coatings absorb light and the more you want them to reflect the light in front of them (for a brighter display) the more they absorb the light behind them (what you’re looking at through the binoculars). The challenge of light absorption of this nature is strong enough that two of the makers of optically superior laser rangefinding binoculars have opted for unusual choices in prism design, partially to counter the light loss. Leica, on its Geovid series, has gone with a Perger-Porro prism design, while Zeiss went with an Abbe-Koenig prism system. Both of these choices offer more light transmission and are far less common than the Schmidt-Pechan prisms most often simply called roof prisms that are found in most binoculars, including the Sig 10ks, Vectronix Vector X, and Swarovski EL ranges.
Background GPS Mapping with BaseMap:
With this generation of laser rangefinders, Sig and a few other makers have introduced the ability to mark the location of a ranged point using BaseMap GPS software. This feature requires the paid subscription Pro version of the software, currently going for $39 a year.
The biggest goal of remote marking is to help the hunter to find the start of a blood trail. Often, after an animal is shot, it often goes some distance before it dies. Because animals do not understand what being shot represents, they do not usually go far if they are not actively chased because they neither understand they are dying nor that they are being hunted. They just feel hurt, then weak and tired. As such, after delivering a shot, hunters typically lay low and wait a while to start tracking the animal so that it will not likely go far before bedding down and dying. It is therefore quite helpful to have an accurate point to start your search for a trail but this is not so easy when the game starts 500yds from you and you have to wait a while before starting to track it. Things can look a lot different standing in a field than looking at that field from 500yds. It can be hard to find your starting point, and that is the main idea behind dropping a remote GPS point on it.
Prior to doing this year’s rangefinder reviews, I had not noodled with the BaseMap software at all. I had heard of it from people using its satellite map to estimate ranges to targets by bringing up a map of the range and dropping points on the map where it thought the targets were, but I hadn’t actually tried it. I found it a slick software package and have used it a number of times not in conjunction with testing rangefinders. It has lots of functionality around creating routes, measuring distances, and marking campsites, gear drops, and other important points. BaseMaps is also designed to be used without access to a cell phone signal. This is an important consideration, given that the locations having the best hunting and hiking rarely offer cell service. This also gives the Sig Kilo 10k, and other makers’ products that interface with BaseMaps, the advantage of working without cell service, whereas Swarovski’s similar feature uses its own proprietary software which requires a cell signal. Most importantly from the standpoint of my use, BaseMaps interfaced quite easily with the Sig binos.
Within BaseMap, mapping points while ranging them is found within the BaseMap software under tools and is called “Remote Marker”. Once you have paired your binos to the software, hitting this function will prompt you to range what you want to mark. When you range, the point will show up on your map with a line from where you are standing to the ranged point. You can then choose to place a marker at that point, manually adjust the marked point’s location, or just dump the point. The software uses three data inputs to decide where the point should go. These are the user’s location as determined by your phone’s GPS, the distance and angle of the point from the user determined by the binos, and the Azimuth of the binoculars, determined by the compass in the binos. The accuracy of first couple of inputs are generally quite good. Typically, outside the GPS is good to within about 3yds, the range within 2yds, and the inclination within a degree and a half or so. In my testing, however, the Azimuth was only good within 20 degrees or so. This translates into quite a lot of error as the distances increase and boy can these Sig Kilo 10ks range a long way.

Fortunately, this is not a random error and we are not talking about an area of uncertainty as much as a path of uncertainty. There is very little uncertainty in either the user’s starting location or the distance of the target from the user. Therefore, you can pretty easily mark out an arc-shaped path of possibility and just walk it from one end to the other. You can do this by ranging and marking the same point 5-10 times. All those points will line up on a gently arcing path. Its no nice, clean, single pinpoint, but it is still a tremendous aid in helping you find the animal’s trail. Keep in mind that when I did my testing of this feature, more than half the time the correct target location did not actually lie within the bounds of the 10 points I dropped so when you are following the arc made by the points you dropped, you will likely need to extend past the furthest point in each direction in order to reach the target location you ranged. Frankly, the software should probably just mark an arc for you on the map instead of a single point. This would save you from having to mark the same point 5-10 times, and, I believe, this is what Swarovski actually did. The little chip-sized digital compasses in these and other competing binoculars just aren’t very accurate.